机器人智能操作新突破 少数据也能高效泛化
在机器人智能操作领域,我们常面临一个棘手的问题:AI的落地应用往往受限于数据稀缺和泛化能力不足。很多现有方法要么需要海量数据喂养,要么在环境稍微变化时就“掉链子”。那有没有办法让AI像人一样,仅凭少量演示就能稳健应对复杂多变的真实场景呢?
美国东北大学和波士顿动力RAI团队的研究人员最近带来了好消息,他们提出了一个名为HEP(Hierarchical Equivariant Policy via Frame Transfer)框架,首次引入了“坐标系转移接口”。这个接口巧妙地将高层策略的泛化能力与低层策略的灵活性无缝结合,从而让机器人能够用更少的数据进行高效学习,并展现出强大的泛化能力。
这项创新为机器人在少样本、高鲁棒性、多场景下的部署开辟了一条全新的道路。
HEP框架的三大核心贡献
HEP框架之所以能实现这样的突破,主要得益于以下三点:
- 极简高效的分层结构:它采用了一种“高层负责大局,低层处理细节”的分工模式。高层模块会预测全局的关键子目标(keypose),而低层模块则在此基础上,在局部坐标系中自主优化机器人的具体运动轨迹。
- 空间对称性自然泛化:HEP在平移(T(3)群)和平面旋转(SO(2)群)下都保持等变性。这意味着无论物体怎么移动或旋转,模型的预测结果都能相应地平移或旋转,大大减少了对训练示例数量的依赖。
- 创新型体素编码器:为了高效处理三维视觉信息,HEP采用了一种“堆叠体素(Stacked Voxel)+SO(2)等变网络”的组合。这种编码器能很好地兼顾细节和计算速度,确保机器人对环境的感知既精准又快速。
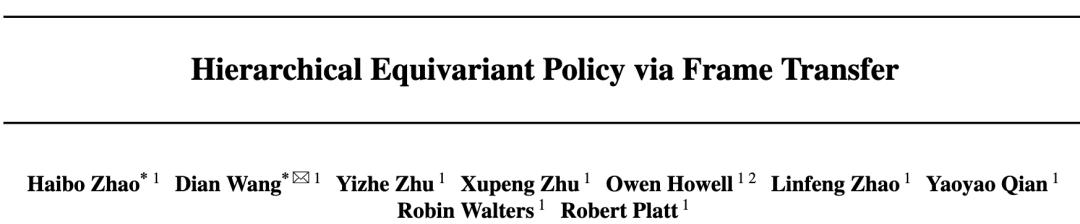
方法概览:三步走实现机器人智能决策
HEP框架由三个主要部分协同工作:
- 高层策略:它首先像“侦察兵”一样,读取机器人感知到的三维点云信息,然后预测出一个粗略的目标位置,也就是“关键姿态”。
- 坐标系转移接口:这是整个框架的“枢纽”。它会把全局点云和预测的关键姿态一起,转换到一个以关键姿态为中心的局部坐标系里。这样一来,后续的所有处理都基于这个“局部视角”进行,大大简化了问题。
- 低层策略:最后,低层策略在这个局部坐标系中扮演“执行者”的角色。它通过对体素化后的三维视觉特征进行等变扩散运算,生成连续、精细的机器人动作轨迹。
值得一提的是,HEP框架还兼容开放/闭环两种控制模式,可以一次性输出动作,也可以逐步反馈调整。而且,它的设计非常轻量高效:高层策略只需预测简单的平移向量,降低了计算和学习难度,同时增强了泛化性;低层策略则专注于细节,并通过坐标系转移接口从高层获得强大的泛化能力。
“坐标系转移接口”:泛化与鲁棒性的完美桥梁

“坐标系转移接口”是HEP框架的核心创新。它的设计思路非常精妙:高层策略给出任务的“参考坐标”,低层策略则在此基础上自主优化执行细节。这种设计不仅赋予了低层策略极大的灵活性,还巧妙地将高层策略的泛化能力和抗干扰性无损地传递给了底层,实现了“泛化性与鲁棒性”的双重提升。
这个接口的优势显而易见:
- 灵活性:低层策略可以在局部坐标系内自由调整执行细节。
- 泛化性:高层策略对全局变化的适应能力,通过接口无缝传递到低层。
- 简化高层:高层只需预测平移,避免了在高维空间中进行复杂的精确规划。
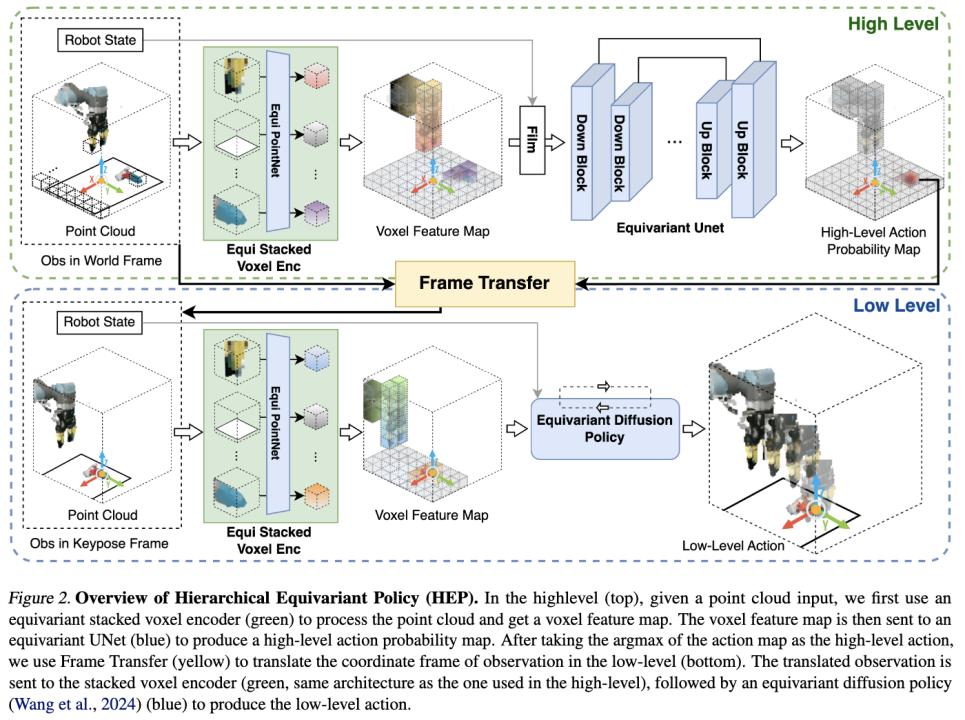
T(3)与SO(2)等变性:机器人也能“触类旁通”
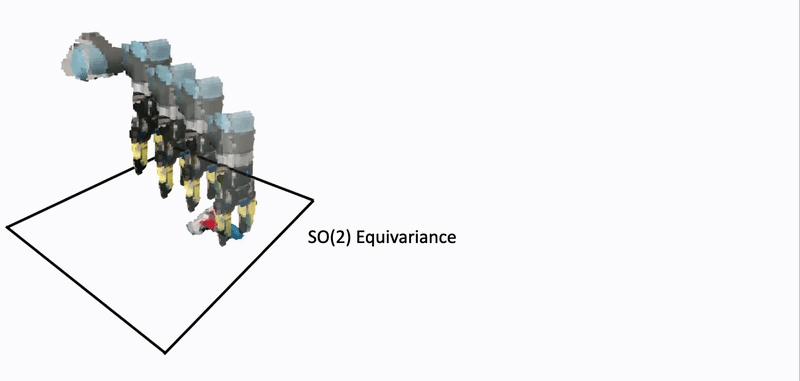
T(3)等变示意图
SO(2)等变示意图
HEP框架确保了当物体发生旋转和沿XYZ轴平移时,模型预测的机器人轨迹也能随之发生相应的平移和旋转,这大大增强了机器人的泛化能力。
- 高层策略:利用SO(2)-等变3D U-Net预测离散化平移概率图,使其同时拥有SO(2)-等变性和T(3)等变性。
- 低层策略:基于堆叠体素编码器提取局部特征,并结合SO(2)-等变扩散策略,确保其SO(2)等变性。
- 系统整体:通过巧妙的坐标系转换,SO(2)等变性得以保留,T(3)等变性则从高层传递到低层,使整个系统具备SO(2)xT(3)的等变性。
创新型体素编码器:细节与速度兼得
HEP框架还引入了一种创新的体素编码器(Stacked Voxel Representation)。它将点云数据按照体素网格进行分组,然后通过等变PointNet聚合每个体素内点的特征,最终形成c×D×H×W的等变体素图。
这种编码器具有以下优势:
- 细节保留:与传统的下采样方法相比,它能更好地保留局部几何信息。
- 计算友好:点云-卷积混合结构的设计,在速度和精度之间取得了很好的平衡。
- 等变性:理论上保证在T(3)×SO(2)变换下保持一致性,进一步提升了泛化能力。
实验验证:效果显著,真实世界大显身手
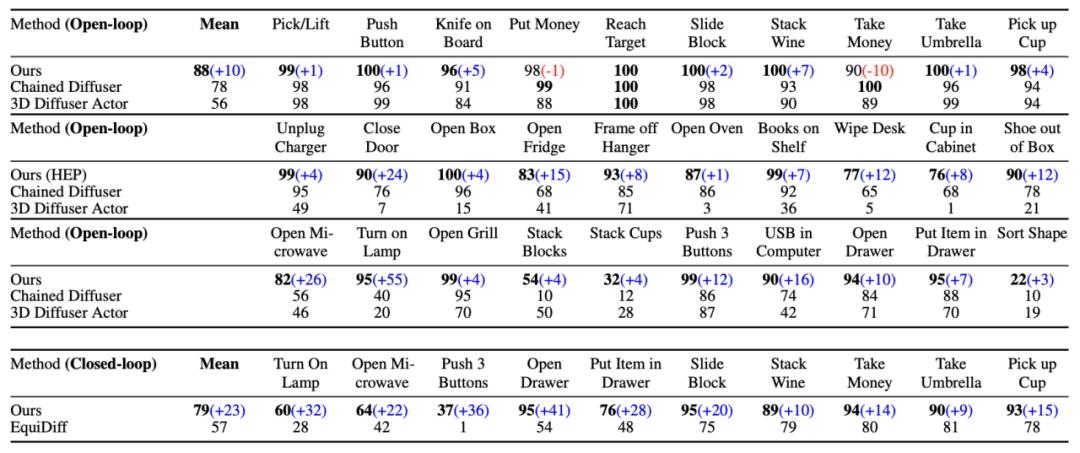
研究团队在30个RLBench任务上进行了仿真实验,每个任务仅使用100条演示数据进行训练。结果显示,无论是开环还是闭环测试,HEP框架都表现出色:
- 开环结果:HEP在30个任务中赢得了28项,平均性能提升了10%。
- 闭环结果:在10个长程任务上,HEP的平均性能更是提升了23%,显著优于其他单级方法。
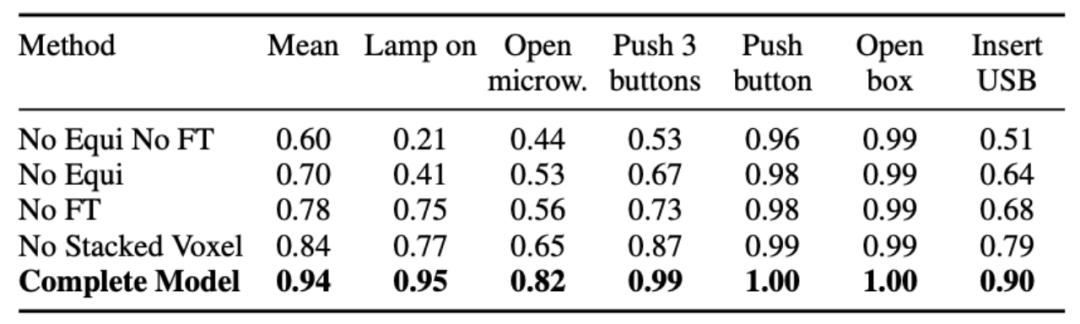
消融分析也充分验证了各模块的贡献:去除等变结构性能下降24%,去除坐标系转移性能下降16%,去除堆叠体素性能下降10%。这表明HEP的每个核心模块都不可或缺。
真实机器人测试:复杂任务轻松搞定
HEP框架在真实机器人上的表现同样令人惊喜。仅用30条演示数据,它就让机器人学会了包括移锅盖、加清洁剂、擦洗等多步协作的鲁棒“洗锅”任务,明显优于非分层方法。这充分展示了分层策略在复杂长程任务上的显著优势。

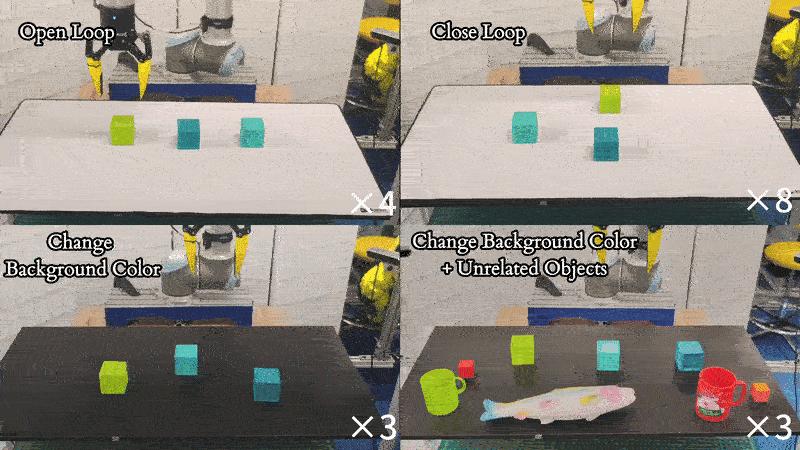
“坐标系转移接口”也再次证明了其作为泛化性和鲁棒性传递桥梁的关键作用。在Pick&Place任务中,HEP仅凭一次演示,低层扩散模型即可实现1-shot泛化学习,大大提升了数据效率。即便在环境变化或引入无关物体的扰动下,HEP的成功率也比传统方法高出高达60%。
展望未来:更灵活的机器人AI
坐标系转移接口对低层策略施加的是“软约束”,这不仅保证了其灵活性,也为未来引入VLM(视觉语言模型)或Cross-embodiment等多种模态、跨平台的高层策略作为决策规划器提供了天然的接口。这意味着未来的机器人AI将更加灵活,能够更好地适应各种复杂多变的应用场景。